ふとしたきっかけからRCカーを始めることになりました。

「コミカルアバンテ」という最近発売されたデフォルメサイズのマシンなのですが、組み立ててみて「この中にカメラを仕込んでモニター越しに走らせてみたいな」と。ボディは結構空間があるので色々仕込みやすそうです。
というわけで色々実験。RCは以前少しやっていたのですがイチから組むのは初めてで、電子機器とかは全然なので調べながら進めていきます。
■FPVカメラ
まずはカメラ。やろうとしていることはドローンではポピュラーなことだそうで、「FPV(First Person View:一人称視点)」というそうです。それの陸上版なのですが無線で映像をモニターに飛ばすには電波の周波数の問題が出てきます。ドローンでよく使われる映像用電波は「5GHz帯」という、特別な免許がないと使ってはいけない帯域です。
ということでその帯域でない電波を使うカメラ&モニターのセットを買いました。


京商 2.4GHz FPVシステム KYOSHO オンボードモニター
こちらは2.4GHzの電波で免許不要で使えるものです。とりあえずステアリングのチャンネルを抜いてカメラを入れて、動作に問題なし。ただこのままでは車は真っすぐにしか動きません。
■チャンネル数の確保
元々使っていたRCシステムは2chのものです。前後移動に1ch、ステアリングに1ch。RCカーならこれだけで動くのですが、例えばカメラの電源を確保するには同様のチャンネルとその接続ソケットが必要になります。つまりカメラのチャンネルが足りないわけです。

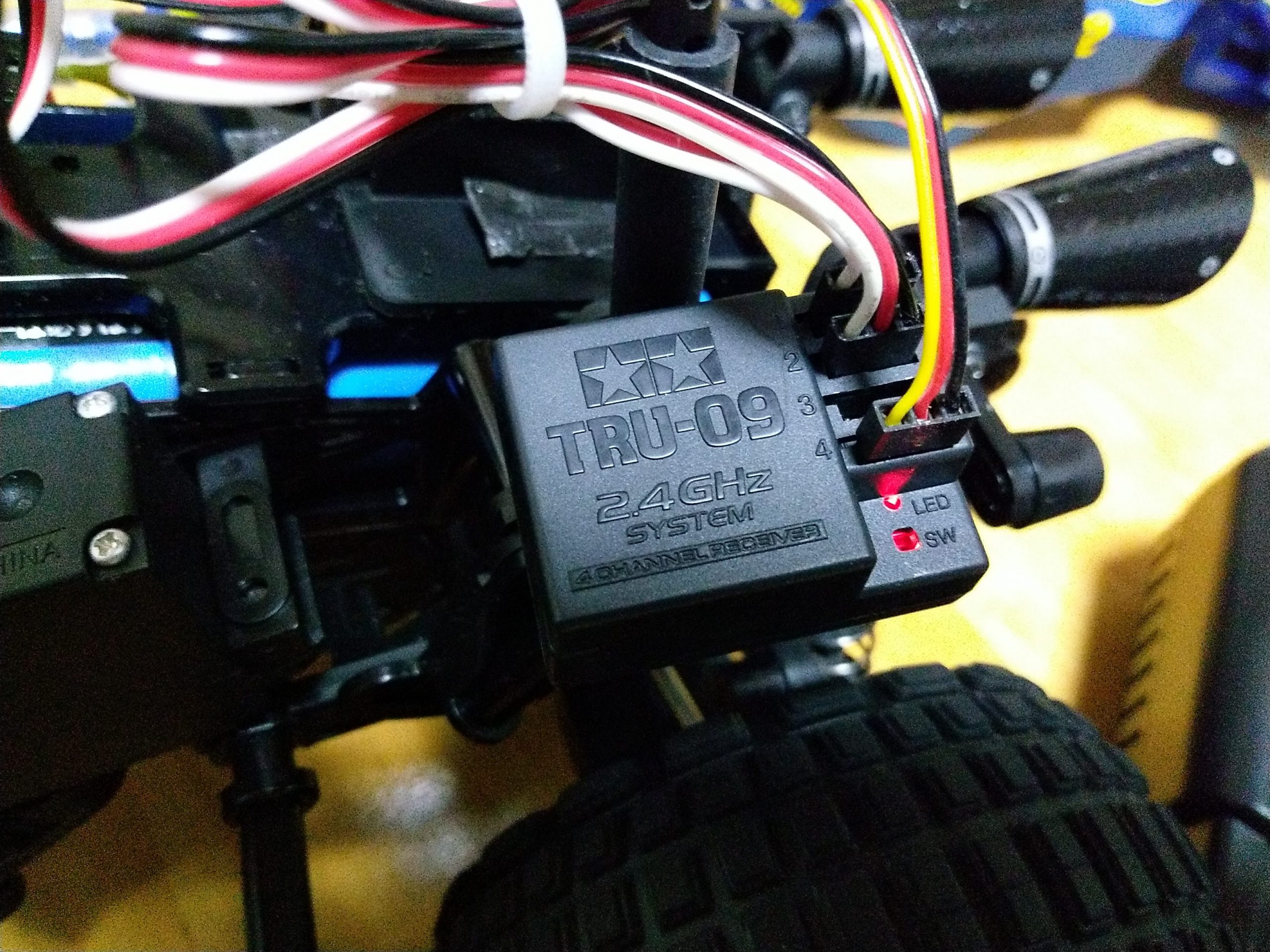
なのでRCシステムの一部を変えて、プロポと受信機を4chのものにします。今まではステアリングをホイールで回すタイプのプロポでしたけど、次はいかにもプロポなもので「スティックタイプ」というものです。付属の受信機も差し込み口が4個になっています。
これでカメラの電源が確保できたのと、もう一つやりたいことの実験が出来ます。
■カメラの可動
やりたかったのはカメラの可動。単に車載カメラにすればいいんですけど、左右とか上とかカメラが向けたら面白そうだと思い実験です。まずは左右から。
いわゆる首振りですが、これには「サーボモーター」というステアリングにも使われるモーターを使います。スティックを右に倒したら倒した分だけ右に、左も同様に動かすことが出来ます。大体60度位で止まってくれますが調整も可能です。サーボは3Dプリンターで作った台座パーツでRC内に固定します。
ちなみに後で確認したことなのですが、電源分岐のケーブルでカメラも一緒に電源供給が可能です。左右の他に上下に動かすとなると4チャンネル全部が埋まってカメラのチャンネルが無いことになるのですが、上下を入れるのも仕様的には問題なさそうです。2チャンネルでもカメラ固定なら何とかなっていたわけですね。
やりたいことは大体こんな感じ。カメラをサーボでヨー方向に回転させる。動かすだけなら全然問題ないんだけど…… pic.twitter.com/TmAGEZzpI8
— ポール@シンクレア民族音楽工房 (@runanse) September 4, 2020
初期実験のものですけどカメラ自体はこんな感じで左右に動きます。
カメラとサーボのマウントを作ったのでFPVモニター見ながらカメラチェック。意外と真ん中が合ってなくて難儀しそう。 pic.twitter.com/WwWYjBp69r
— ポール@シンクレア民族音楽工房 (@runanse) September 7, 2020
モニターと一緒に動画を撮ったのがこちら。
■今後の課題
・カメラ録画が出来ない問題の解決
SDカードは認識しているものの録画や撮影が出来ないんです……何かカードのアイコンが点滅したり点滅したまま赤くなったり。GB数で使えなかったりするものもあるのでそういうのでしょうか?どうしようもなかったら問い合わせしようと思います。
・上下のカメラ移動
必要かどうかは何とも言えないのですが、導入するだけしたいと思っています。サーボ買うのもお金が掛かるので収入が出来てからですね。
・マシンの強化と最適化
FPVで走らせると転倒した時に操作者がいないので起こしに行けません。なので転倒しないようにするのと、外で操作する時のための防水など、マシン側にも色々対策が必要です。
ロスト(紛失)の可能性もあるのでGPSやブザーなども仕込みたいですけど、本当に回収不可能になった時のためになるべく予算は少なくしたいですね……。
・HMD(ヘッドマウントディスプレイ)の導入
やっぱりHMDでやりたいですよね。もしくはモニターをスマホVRモニターみたいに顔に着けるとか……?
・5GHzを使えるようにする
免許を取得してドローン用に売られている5.8GHzのカメラを使えるようにしたいです。必要な免許はアマチュア無線4級だそうで、今本読んで勉強しています。
・ドローン用機材の導入
FPVドローンだとカメラやHMDなどの機材もたくさんあるのでFPVやるなら導入していきたいです。ただRCシステムも陸用ではなく空用になって機材そのものも変わってくるそうなので、また勉強が必要みたいです。いっそドローンも覚えてみた方が良さそうです。